体性感覚をもつ柔らかいロボットフィンガ
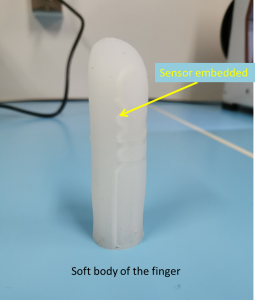
この研究の目標は,柔軟なセンサーが埋め込まれた人間のような柔らかいロボットフィンガを構築することです.この指は人間の指の動きを模倣できるように設計されています.センサーの埋め込みにより,指自体が接触した物体の触感,形状,温度などの情報を感知できるようになっています.

イオンゲルセンサ
私たちはイオンゲルセンサを用いて,人間のように柔軟でありながらも,接触情報を取り入れるセンサの開発を進めています.
この研究の目標は,柔軟なセンサーが埋め込まれた人間のような柔らかいロボットフィンガを構築することです.この指は人間の指の動きを模倣できるように設計されています.センサーの埋め込みにより,指自体が接触した物体の触感,形状,温度などの情報を感知できるようになっています.
私たちはイオンゲルセンサを用いて,人間のように柔軟でありながらも,接触情報を取り入れるセンサの開発を進めています.