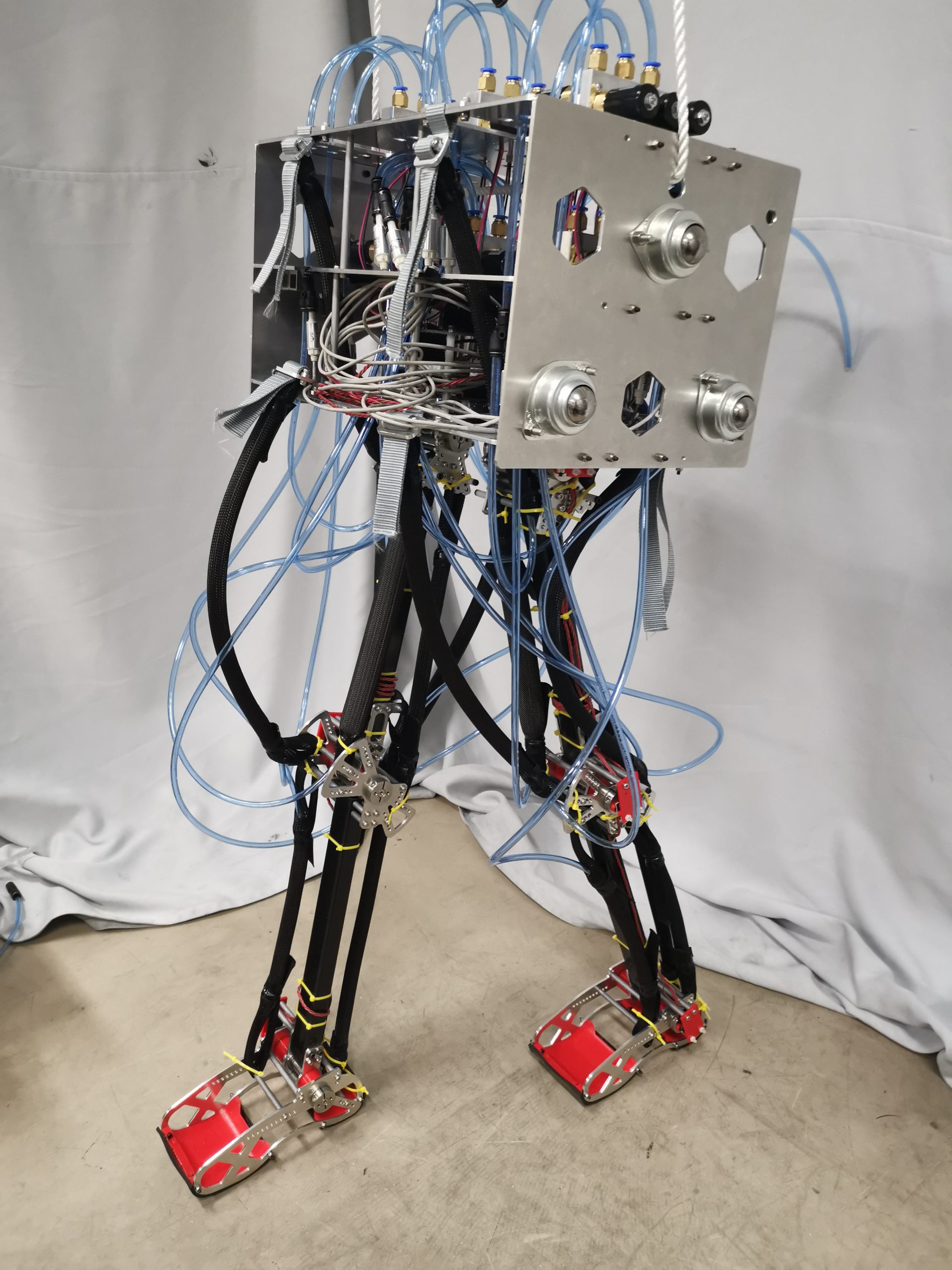
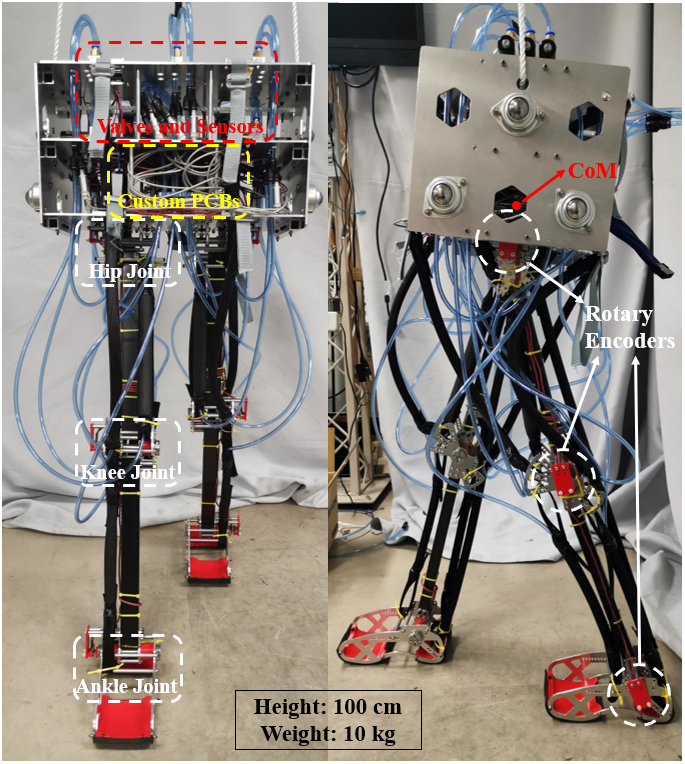
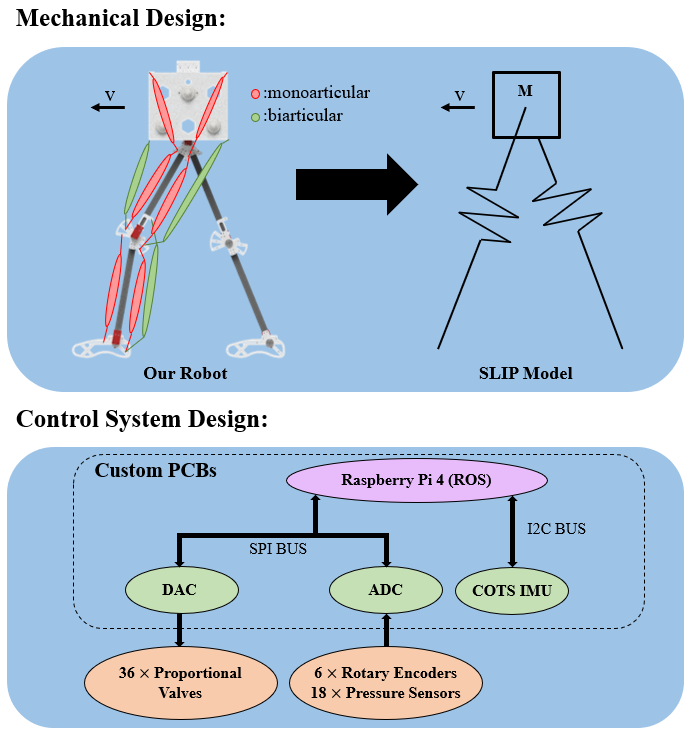
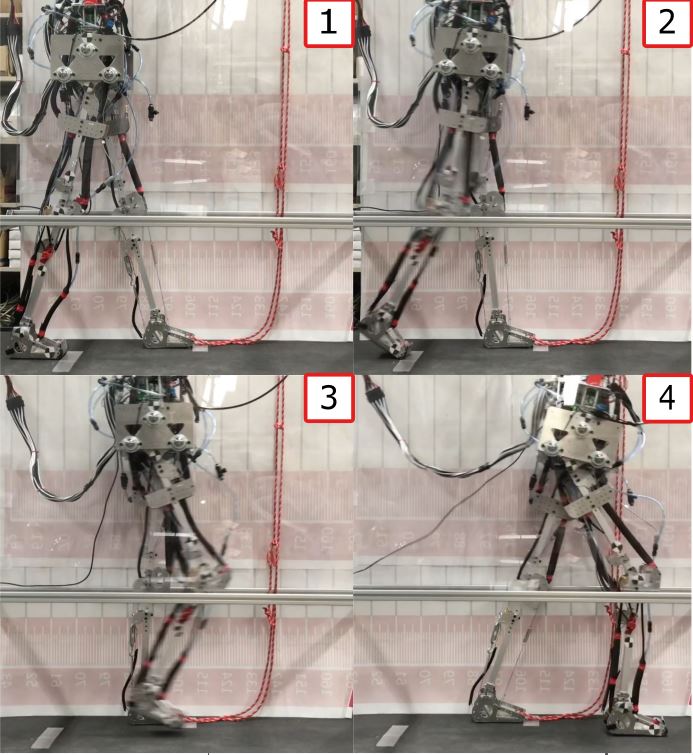
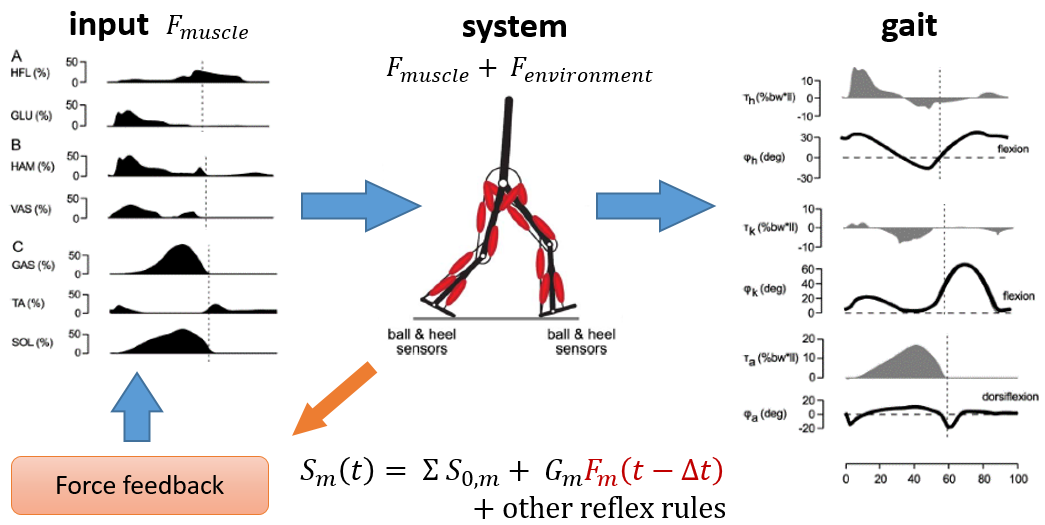
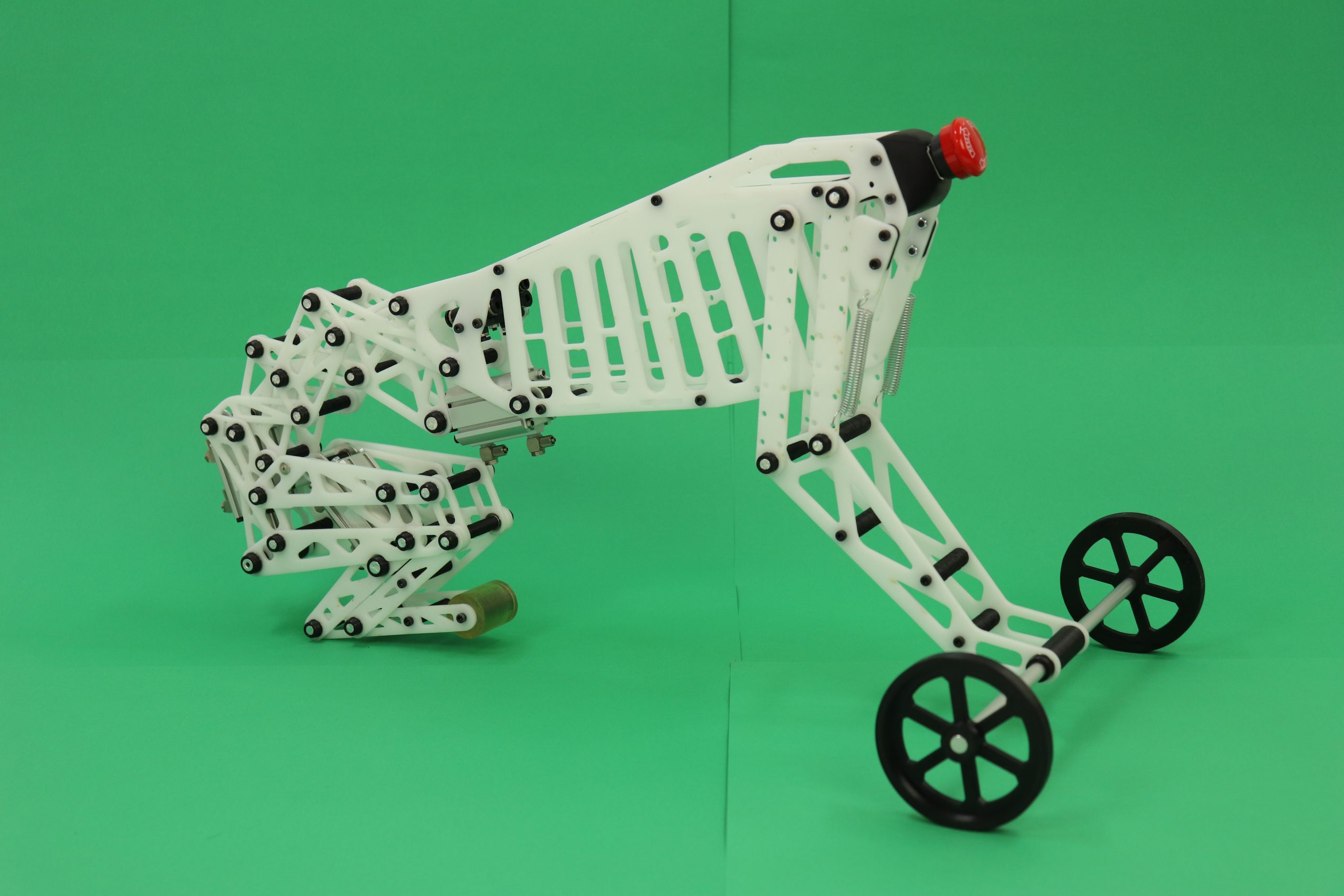
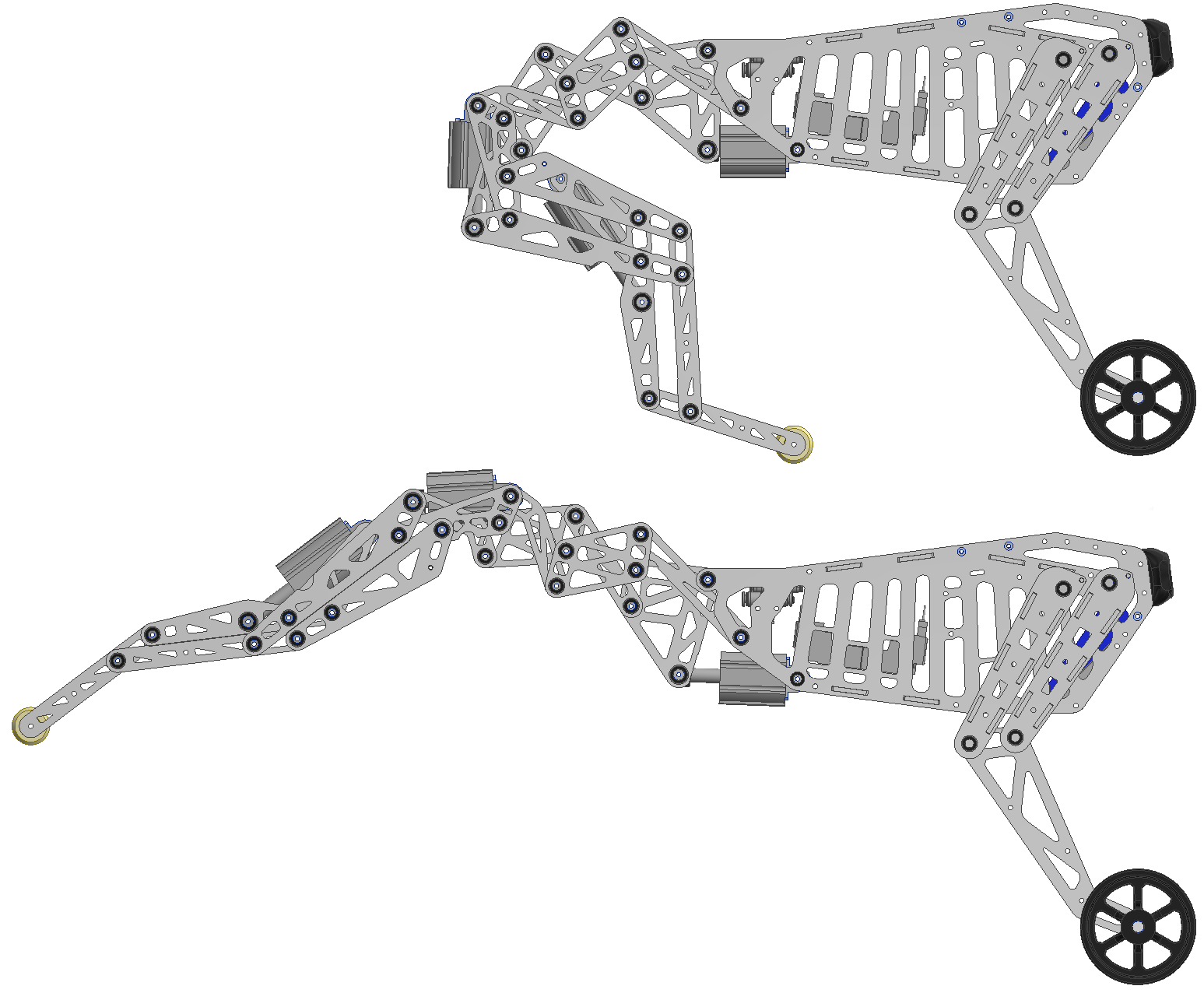
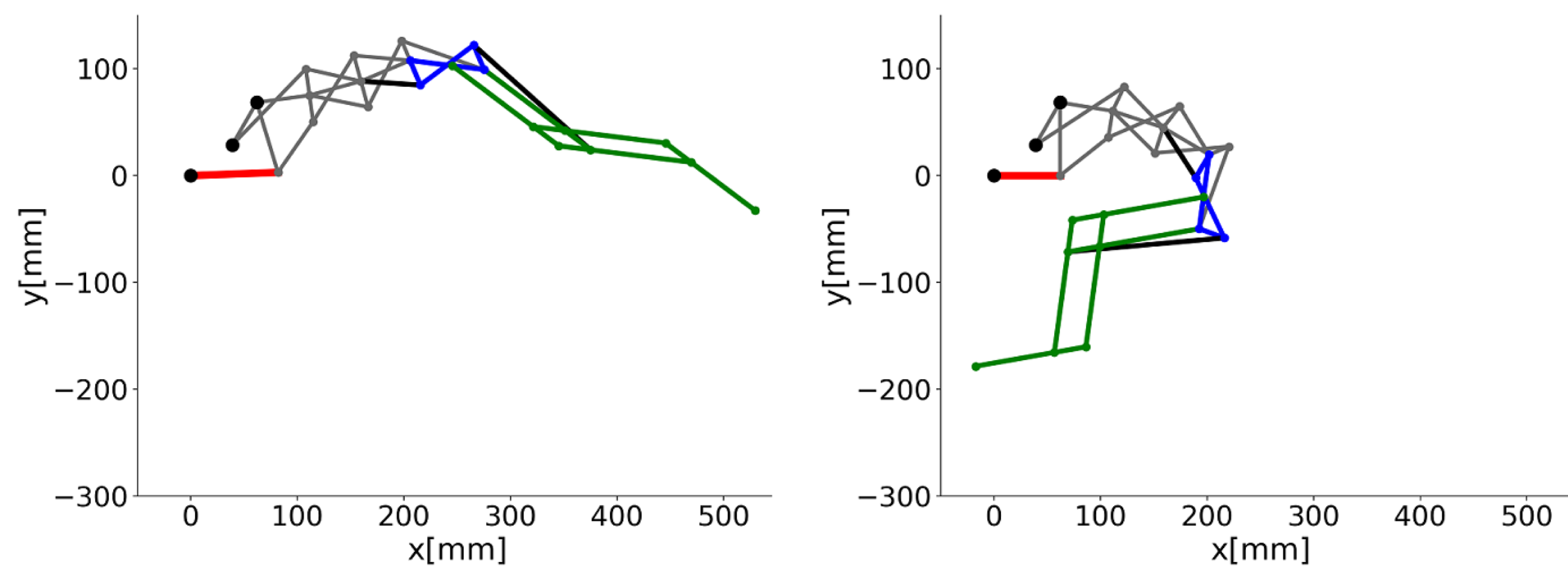
歩行中の筋肉の活性化の基本原理を知るために,Spring-loaded inverted pendulam(SLIP)モデルに基づいて歩行を再現することを目的とした筋骨格二足歩行ロボットを提案します.SLIPモデルは,バネ脚でバウンドする質点を脚に適用したモデルです.
この研究では,
1)SLIPモデルの受動的な振る舞いに合ったメカニズムの設計
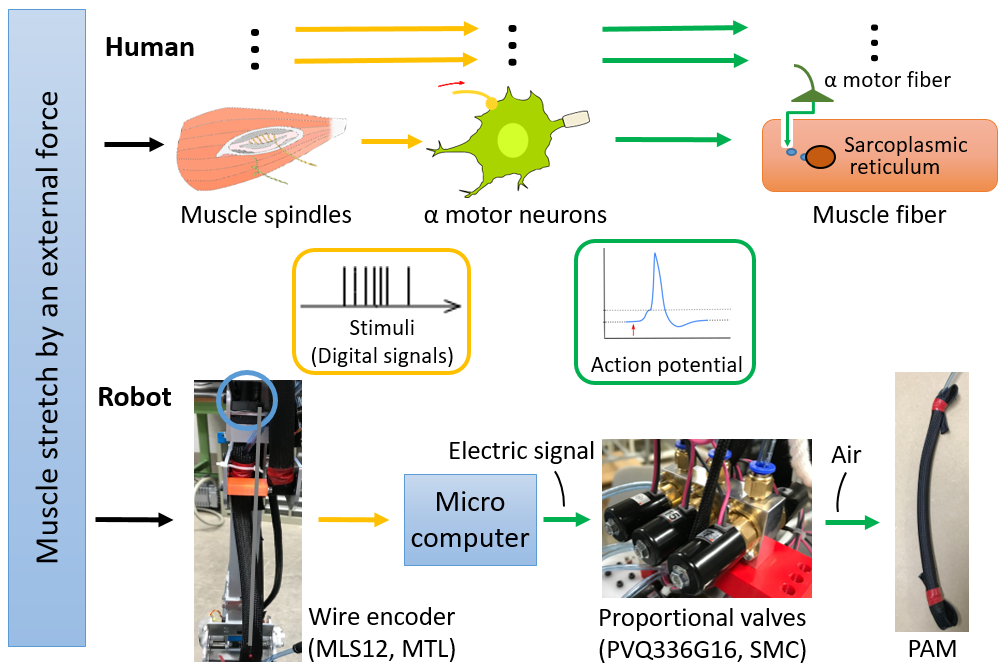
2)マッキベン型空気圧人工筋が生み出す関節コンプライアンスの調節
3)吸排気を行うバルブの制御と様々なセンサの入力を含むROSベースのシステムの実現
を行っています.