匂い源探索アルゴリズム
匂い源探索は工学的に実装することが非常に難しいと考えられている.その理由の一つとして,空気中において匂い場の変化を予想することが困難であることがあげられる.そこで,本研究は昆虫などの匂い源探索行動を計測し,モデル化することで,効率的に匂い源探索を行うことができる人工的なシステムの開発を目的とする.
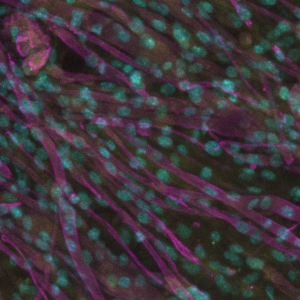
筋細胞駆動型ロボット
筋肉は,あらゆる生物の運動の動力源となっているアクチュエータである.この優れたアクチュエータをロボットに組み込もうとする,筋細胞アクチュエータの研究が行われている.本研究では,生物の持つ多様な動きを再現できるような筋肉を作るために,3Dプリンタを使って様々な形の筋肉を作り,筋肉の動きをデザインすることを目的としている.

