ナビゲーション切り替え
コンテンツへスキップ
Home
Projects
Upper Limb Group
Leg Group
Bio Group
Publications
Members
Contact
日本語
English
2019年12月6日
hosoda
Projects
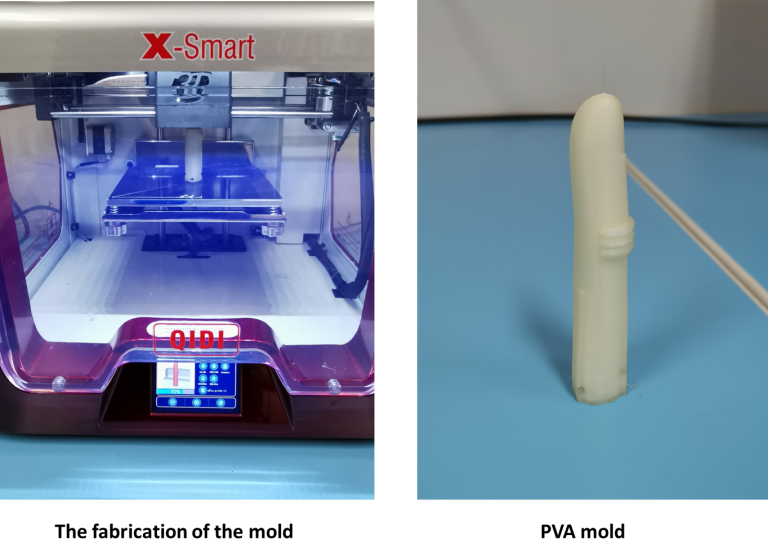
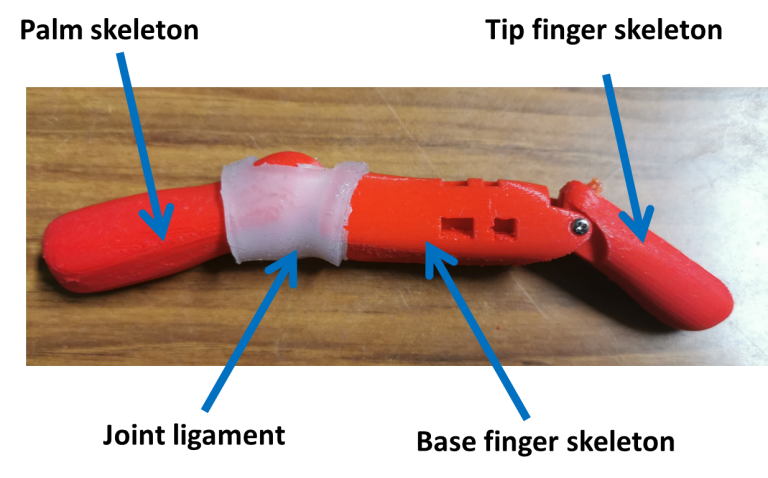
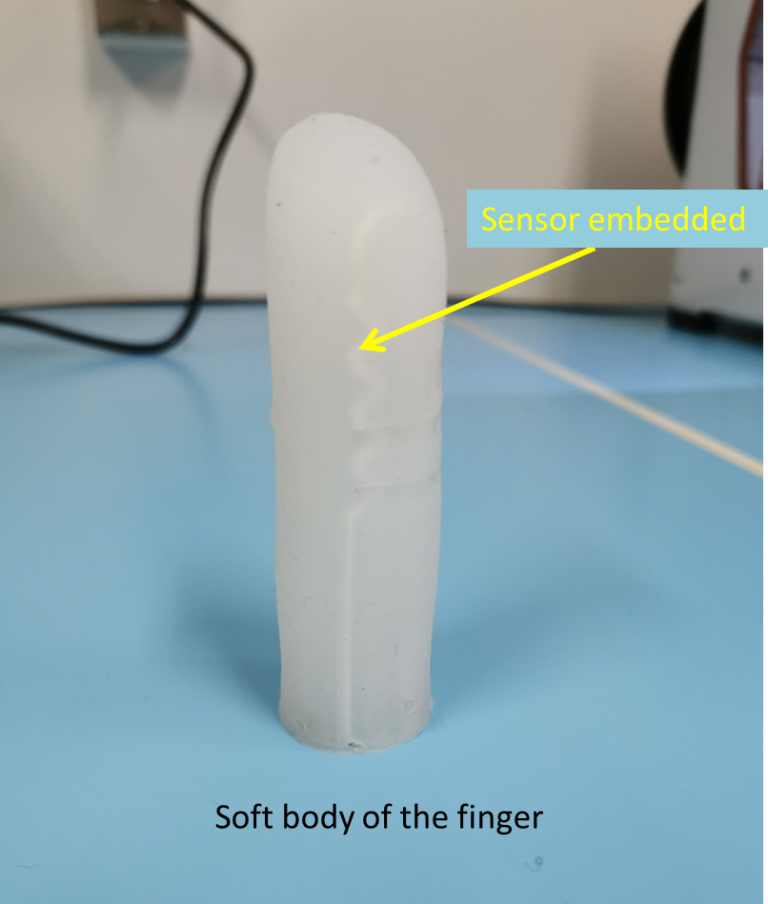
上肢班
上肢に関する研究
前
次
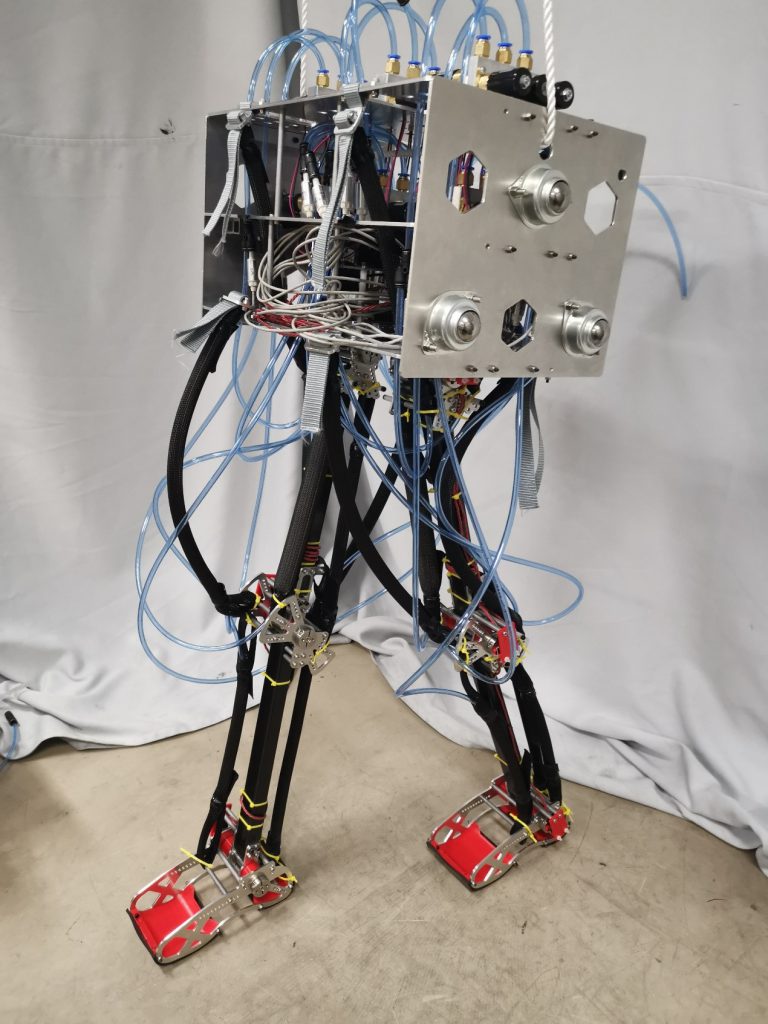
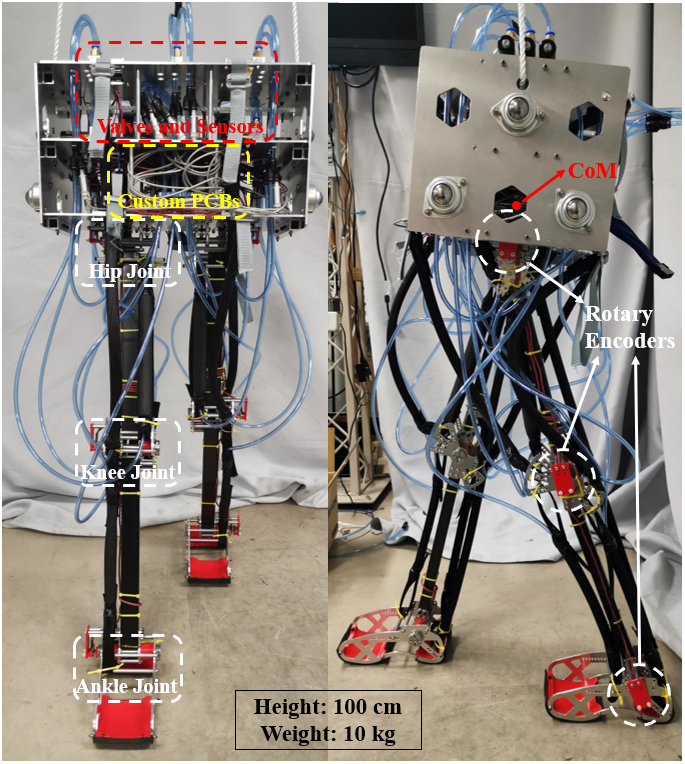
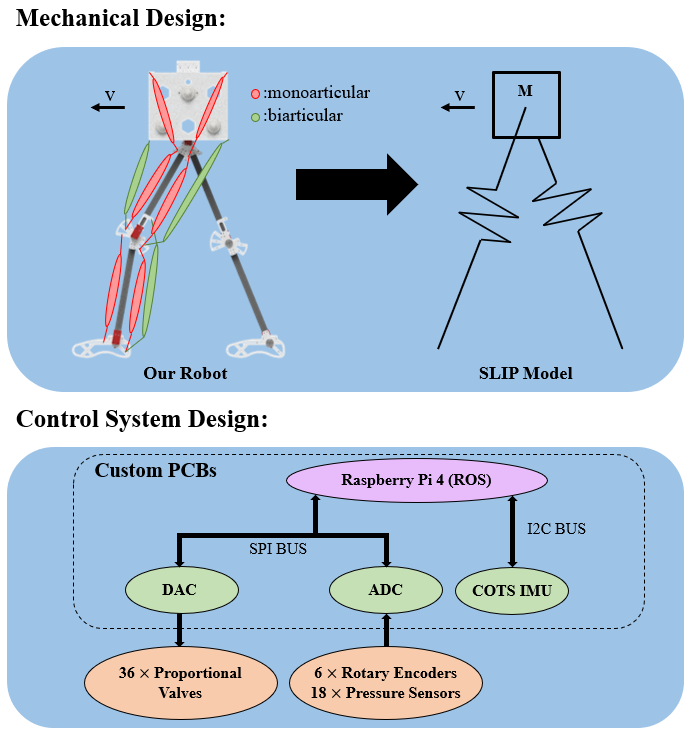
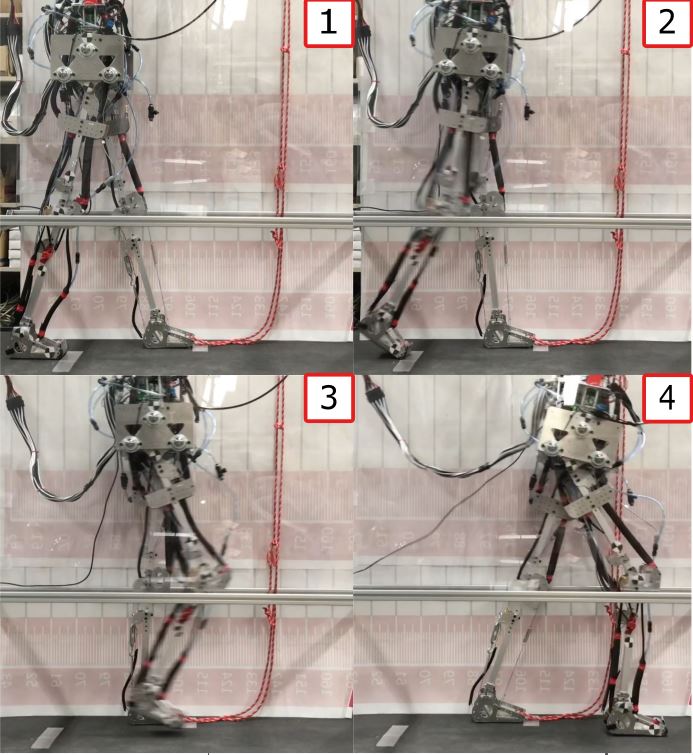
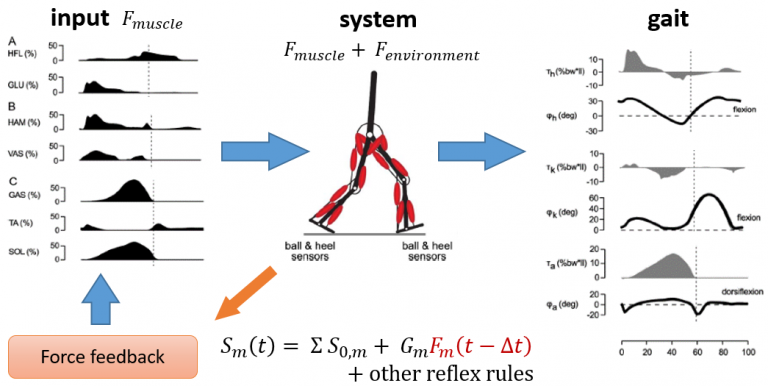
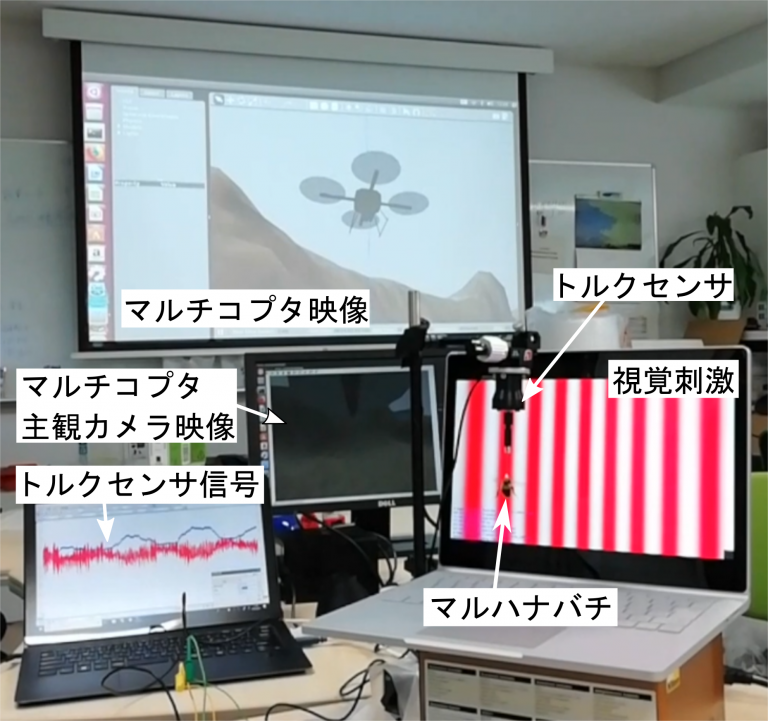
下肢班
脚ロボットを用いた研究
前
次
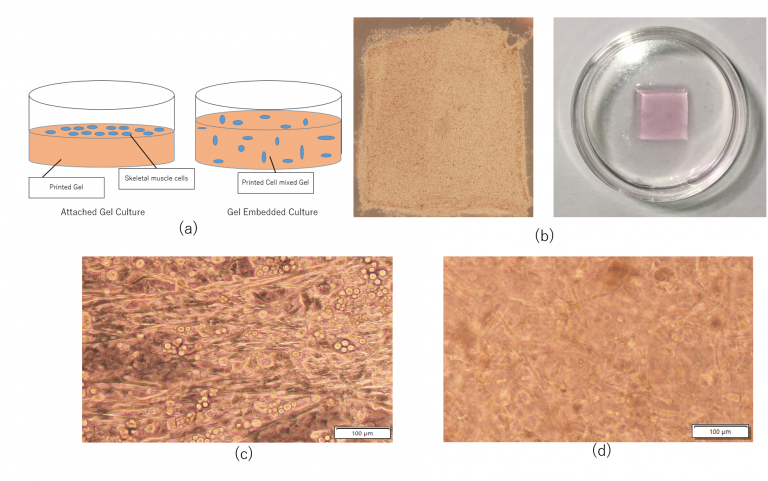
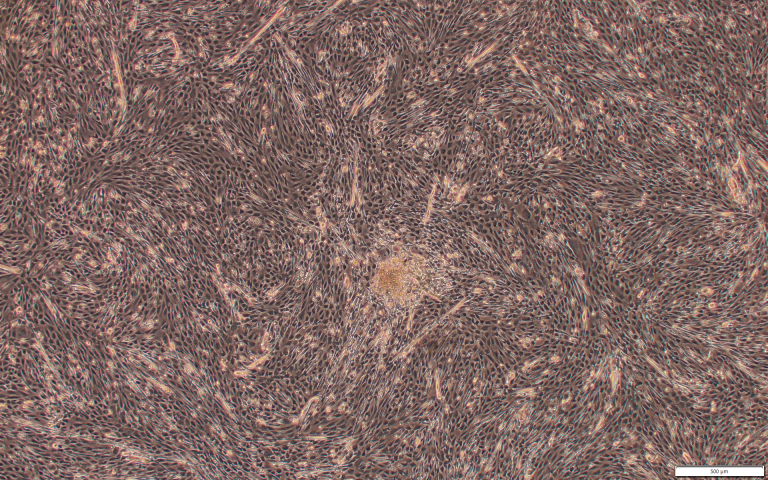
バイオ班
バイオハイブリッドロボットを用いた研究
前
次