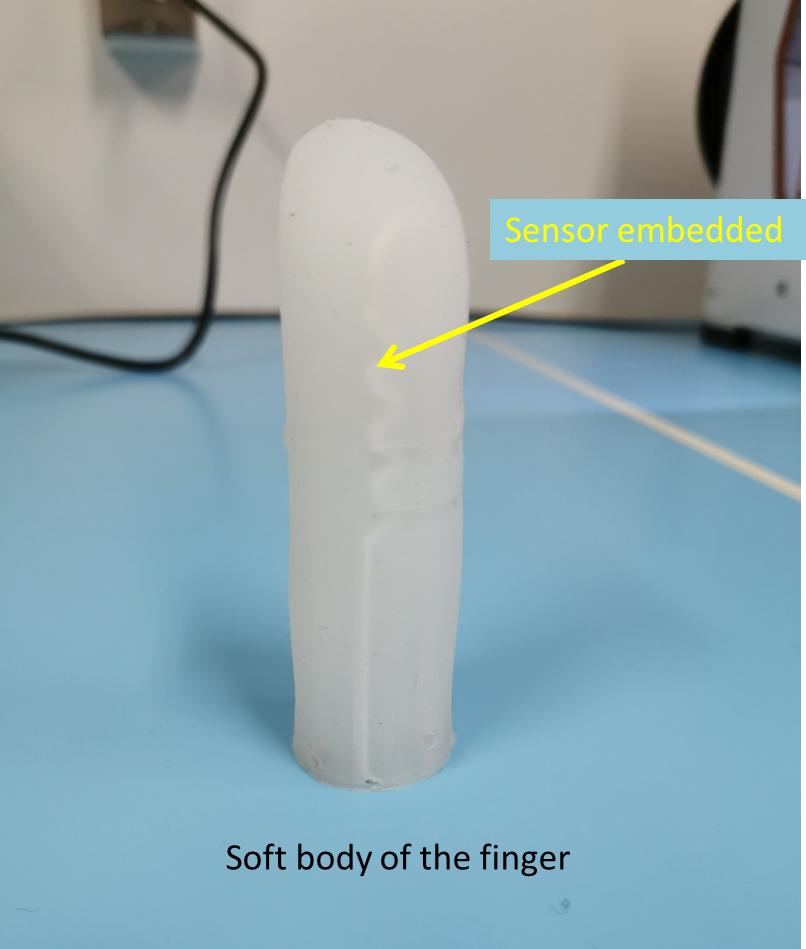
The target of this research is to build a humanlike soft robotic finger, which is embedded with flexible sensor. The finger is designed to mimic the motion of human finger. With the embedding of sensor, the finger itself is supposed to sense the information of the object, like texture, shape and temperature.