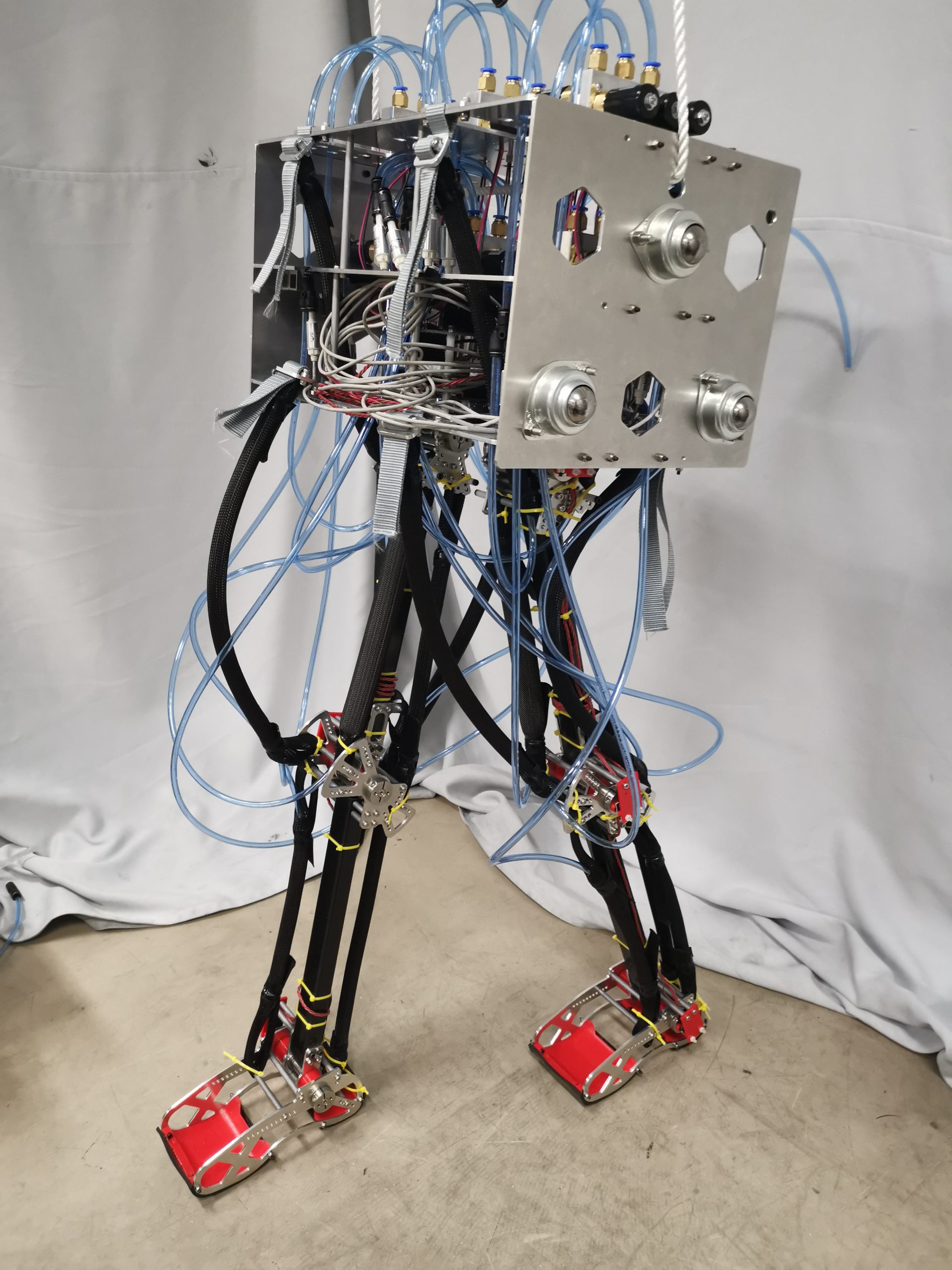
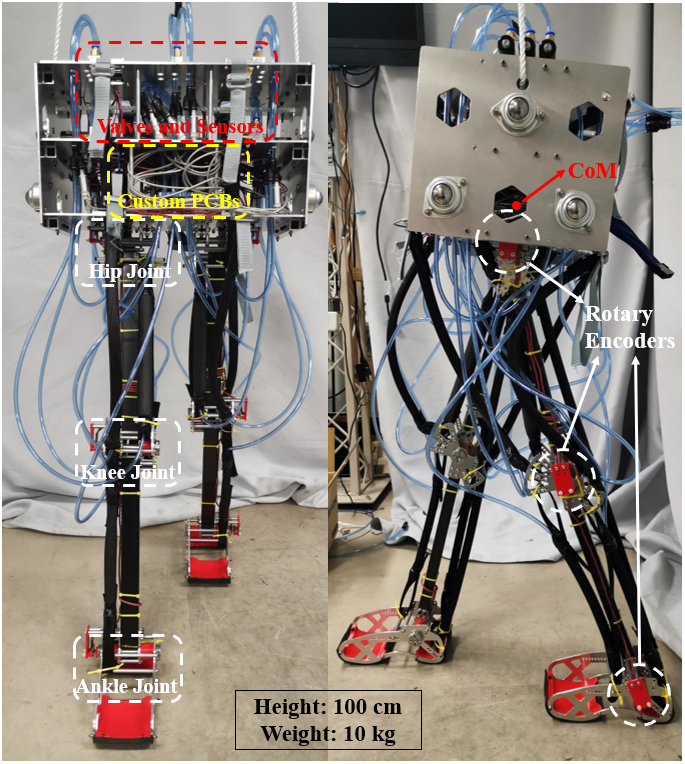
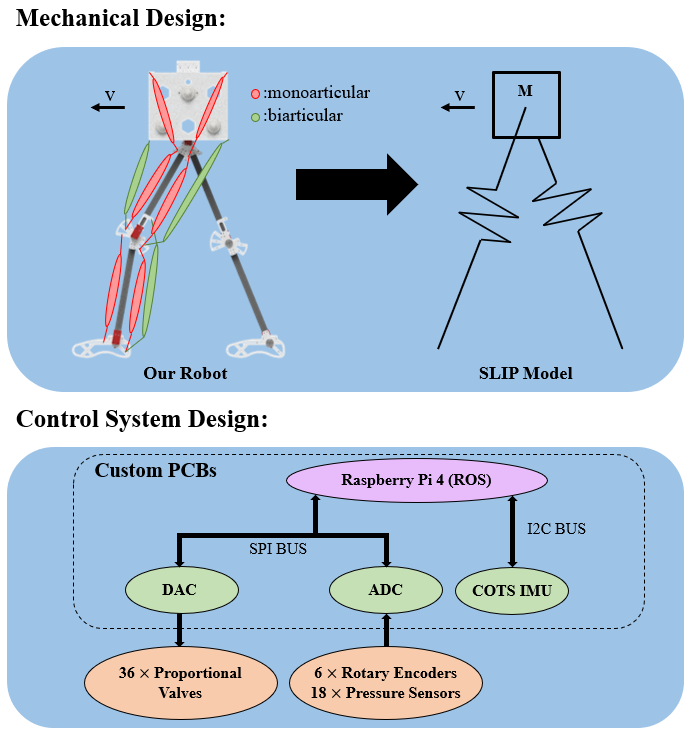
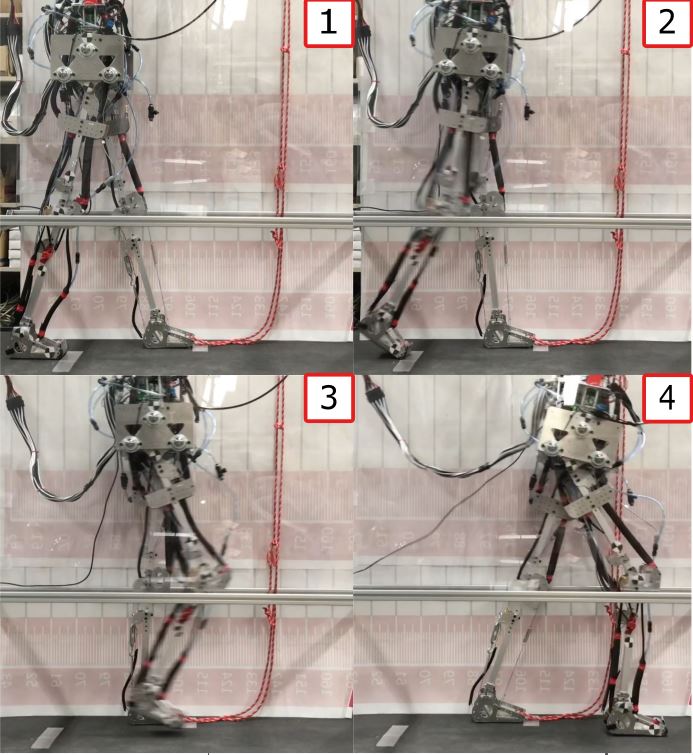
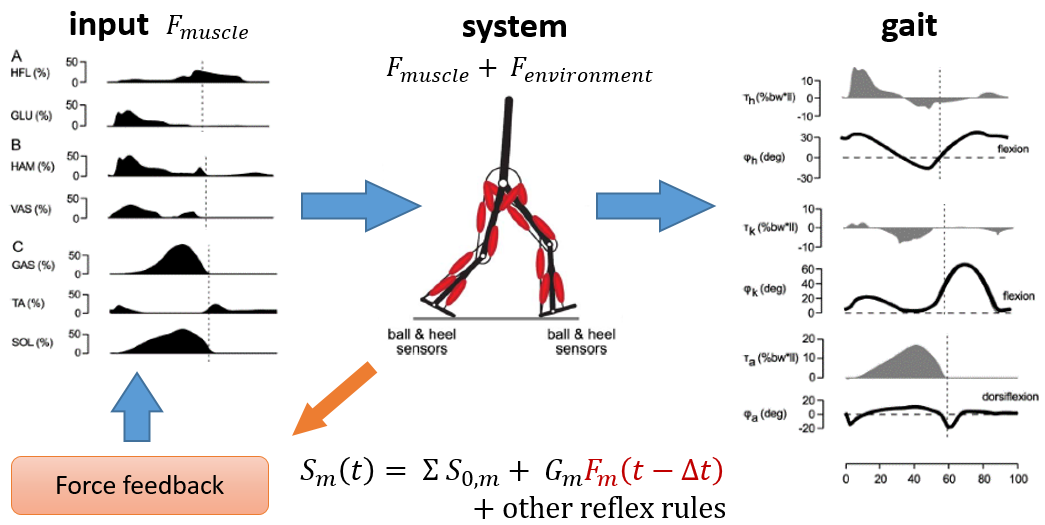
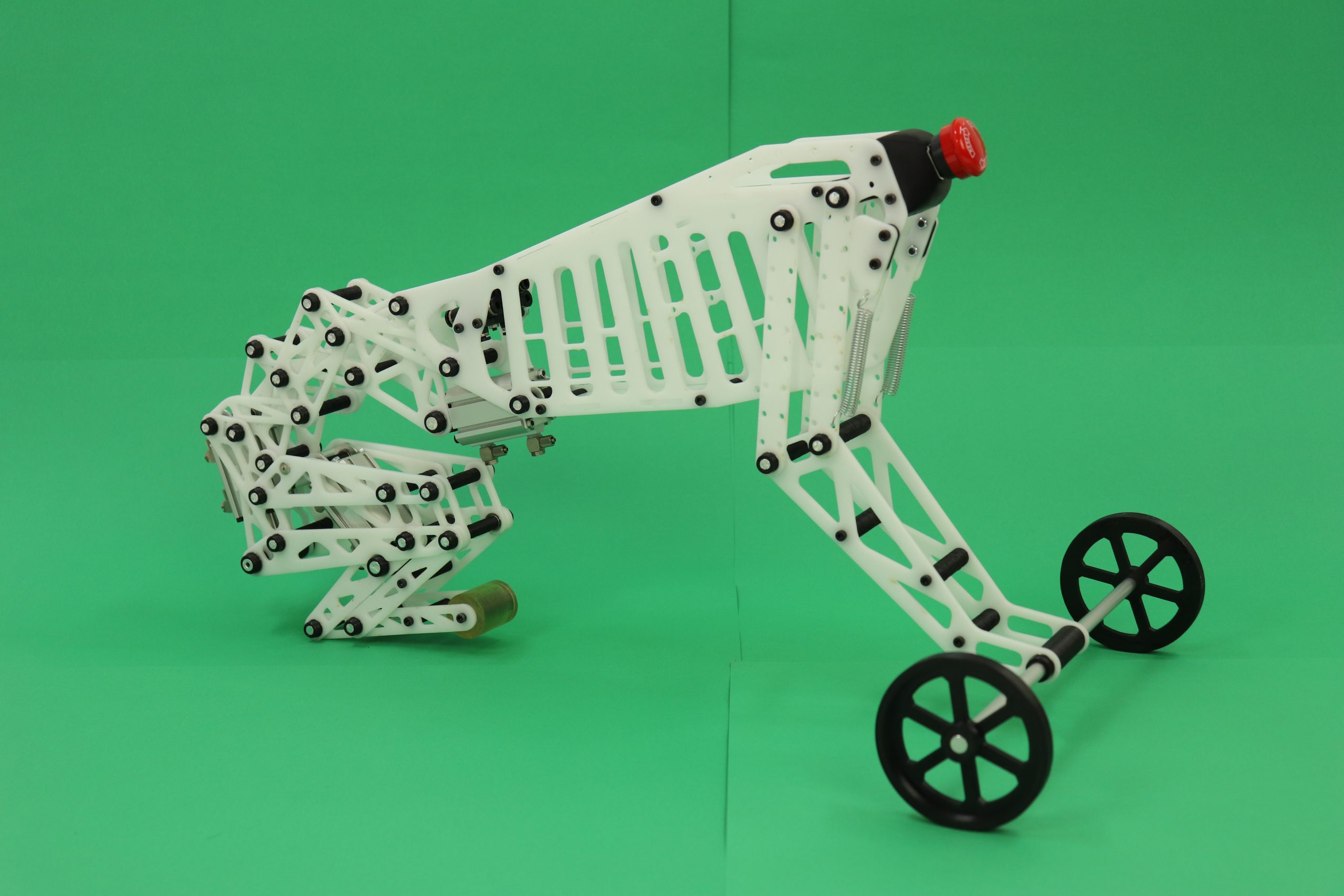
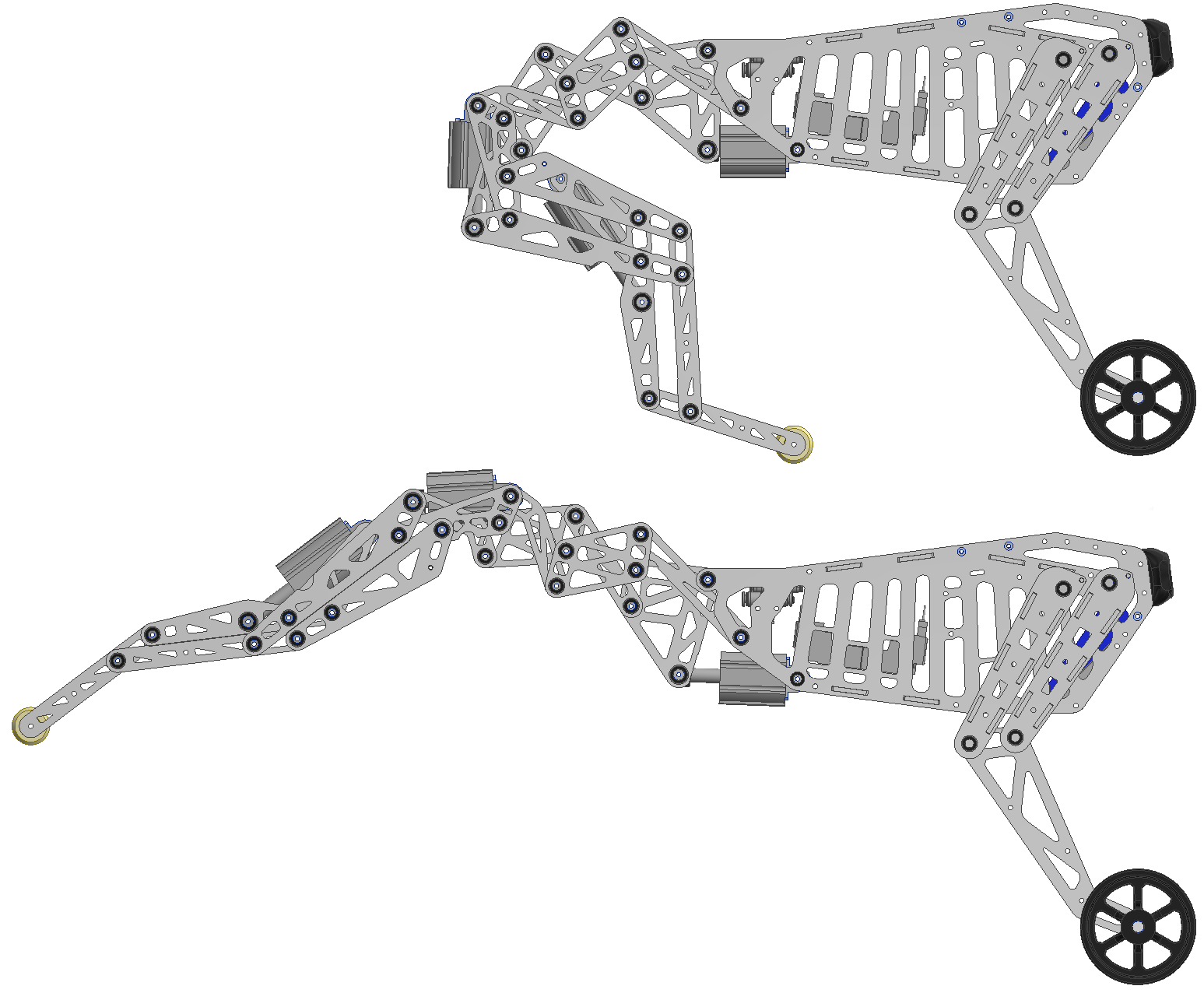
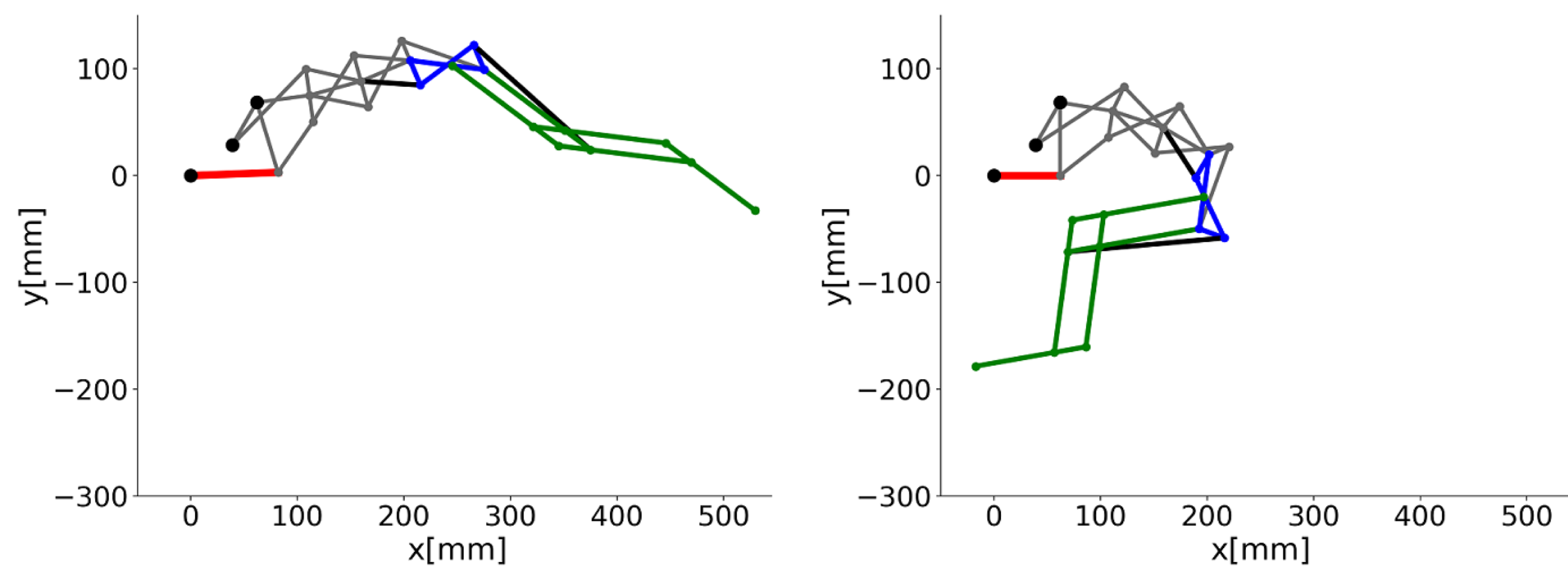
Musculoskeletal structure is demonstrated to play an essential role in the versatile adaptivity of human locomotion. In order to figure out the underlying principles of muscle activation during human locomotion, we present a musculoskeletal bipedal robot that aims to replicate human walking based on SLIP model. 1)The mechanism is just designed to meet the passive behaviors of SLIP model. 2)Joint compliance is tuned with the utilization of McKibben pneumatic artificial muscles. 3)A ROS-based control system that provides low-level control for air valves and reads sensor values is adopted. Both the mechanical features and the control concepts dedicate to the realization of desired locomotion.