
Musculoskeletal Robot Arm driven by Pneumatic Artificial Muscles
Development of Musculoskeletal Robot Arms
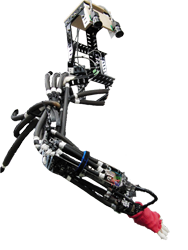
Human's musculoskeletal structures are very complex and they look problems that make their control very difficult in terms of robotics. In this research, we however assume that their musculoskeletal structure must have advantages to realize highly sophisticated human's motions because they have been optimized throughout evolution. In particular, we are focusing on the superior limb and developing musculoskeletal robot arms to reveal and exploit their unknown functions. Door Opening Motion exploiting Inherent Flexibility provided by Pneumatic Artificial Muscles
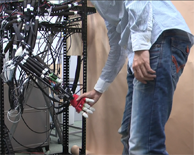
When we open a door, do we accurately measure the 3D position or accurately model the mechanical constraints? In this research, we showed that a very simple control is still possible to open the door if the musucloskeletal robot arm has a humanlike musculoskeleta structure driven by flexible pneumatic artificial muscles without the accurate mesuring and modeling. In addition, we confirmed that pressure and tension data of pneumatic artificial muscles contain information of the door's state such as whether or not the door is unlocked.Dynamic Throwing Motion using Humanlike Shoulder Complex Mechanism
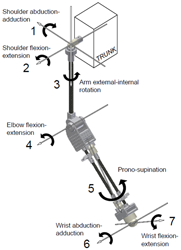
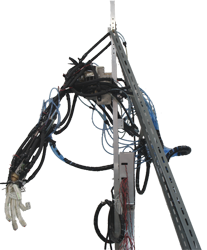
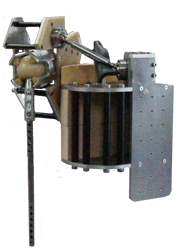
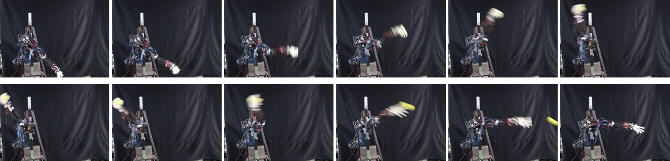
A shoulder complex has one of most complex structures in a human's superior limb. In this research, we developed the wider range-of-motion spherical joint and the sliding scapula mechanism to mimic the human shoulder complex mechanism. The developed musculoskeletal arm with humanlike shoulder complex mechanism could have a wide range of motion and throw a ball dynamically as the same as that of humans.Direct Teaching Method for Musculoskeletal Robots driven by Pneumatic Artificial Muscles
Direct teaching is a method which a teacher directly move a robot to indicate desired motions. It is normally done by measuring the robot's posture in each time instance and giving them as the desired values of the feedback posture controller. However, to measure muscle lenghts of developed musucloskeletal robot arms is very difficult due to their complexity. In this research, we proposed the direct teaching method specialized for musculoskeletal robots driven by pneumatic artificial muscles which measures pressures and tentions of muscules instead of their lengths and compute desired pressures without measuring and estimating their lengths.


Related Papers selected from publication list
- Koh Hosoda, Shunsuke Sekimoto, Yoichi Nishigori, Shinya Takamuku, and Shuhei Ikemoto, "Anthropomorphic Muscular-Skeletal Robotic Upper Limb For Understanding Embodied Intelligence", Advanced Robotics, Vol.26, No.7, pp.729-744, 2012
- Shuhei Ikemoto, Yoichi Nishigori, Koh Hosoda, "Advantages of flexible musculoskeletal robot structure in sensory acquisition", Artificial Life and Robotics,2012
- Shuhei Ikemoto, Fumiya Kannou, and Koh hosoda, "Humanlike shoulder complex for musculoskeletal robot arms", IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.4892-4897, Oct. 2012
- Shuhei Ikemoto, Yoichi Nishigori, and Koh Hosoda, "Direct Teaching Method for Musculskeletal Robots driven by Pneumatic Artificial Muscles", IEEE International Conference on Robotics and Automation, pp.3185-3191, May. 2012.
Minimalistic Behavioral Rule and Stochastic Resonance
Stochastic Resonance emergence from a Minimalistic Behavioral Rule
The behavioral rule we propose can be formalized in a straightforward manner in a completely general way as well. Denoting by uit the i-th component of a motor command of an agent at time t, the same component at time t+1 is given by
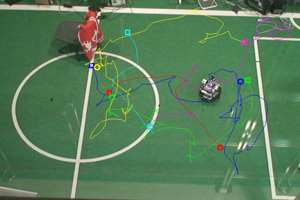
Minimalistic Behavioral Rule for Adaptive Robotic Behaviors
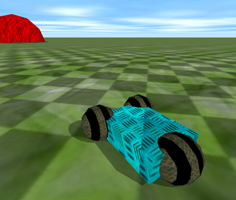
The minimalistic behavioral rule is extremely simple and does not require almost all information about robot's hardwares and environments. Therefore, its property will be maintained even if the environment and/or the robot's hardware was drastically changed. In this research, we gave several severe hardware accidents of a mobile robot (such as blowouts, bend of axle shafts, and loss of control signals) and confirmed that the property of the minimalistic behavioral rule could be maintained.
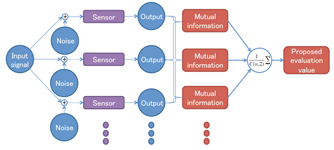
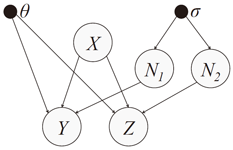
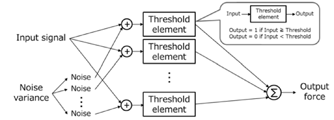
Redundant Sensor System for Stochastic Resonance Tuning without Input Signal Knowledge
To detect weak signals smaller than a sensor resolution has been often studied as engineering applications of stochastic resonance. To exploit stochastic resonace, the noise intensity should be adequate to the intensity of the weak signal, but the intensity of the signal is probably unknown in advance. In this research, we propose the method to optimize the noise intensity by using spurious correlation among redundant sensors without knowing the input signal.
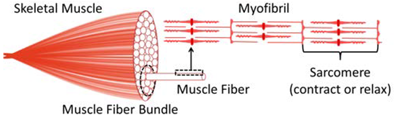
Minimalistic Decentralized Control using Stochastic Resonance inspired from a Skeletal Muscle
Stochastinc resonance can be very useful for control of distributed systems consisting of very simple elements. In this research, we focused on an actuator consisting of elements that can only fully contract and fully relax as the same as skeletal muscles in our body, and proposed a very simple system to continuously control the output force.

where R is a random variable such as a white gaussian noise, ηi means the intensity of the noise in the i-th component of the motor command, and ΔAt expresses how much the agent improved its state during the t-th time step.
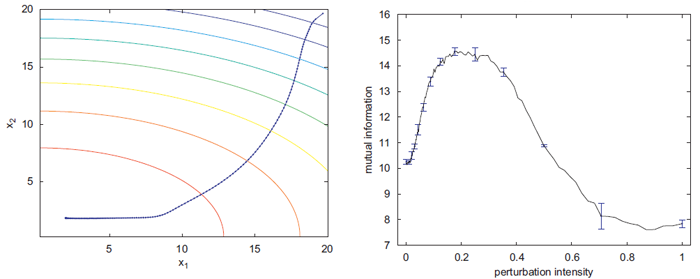
We have confirmed and theoretically proven that the agent can follow a gradient of an evaluation function despite that the rule is extremely simple thanks to stochastic resonance.
Related Papers selected from publication list
- Shuhei Ikemoto, Fabio DallaLibera, Koh Hosoda, Hiroshi Ishiguro, "Minimalistic Behavioral Rule derived from Bacterial Chemotaxis in a Stochastic Resonance Setup", Physical Review E, Volume 85, Issue 2, 8 February 2012, Pages 021905
- Shuhei Ikemoto, Fabio DallaLibera, Hiroshi Ishiguro, "Stochastic Resonance Emergence from a Minimalistic Behavioral Rule", Journal of Theoretical Biology, Volume 273, Issue 1, 21 March 2011, Pages 179-187
- Fabio DallaLibera, Shuhei Ikemoto, Takashi Minato, Hiroshi Ishiguro, Emanuele Menegatti and Enrico Pagello, "A parameterless biologically inspired control algorithm robust to nonlinearities, dead-times and low-pass filtering effects", 2nd International Conference on Simulation, Modeling and Programming for Autonomous Robots (SIMPAR2010), 2010
- Nagisa Koyama, Shuhei Ikemoto, Koh Hosoda, "Redundant sensor system for stochastic resonance tuning without input signal knowledge", IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.4892-4897, Oct. 2012.
- Shuhei Ikemoto, Yosuke Inoue, Masahiro Shimizu, Koh Hosoda: Minimalistic decentralized control using stochastic resonance inspired from a skeletal muscle. IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.343-348, 2013.
Physical Human-Robot Interaction
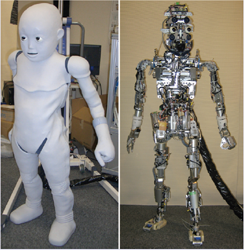
52DOFs Humanoid Robot driven by Pneumatic Actuators
Human-in-the-Loop Learning System in Close Physical Human-Robot Interaction
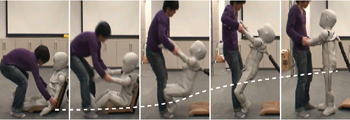
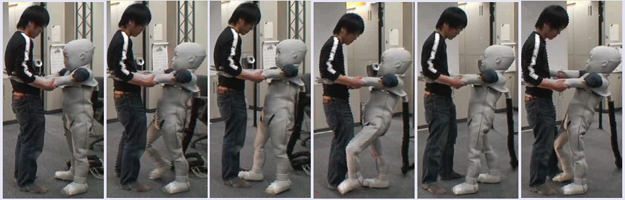
Physical Interaction Learning in Standing-up Task
Physical Interaction Learning in Assisted Walking Task

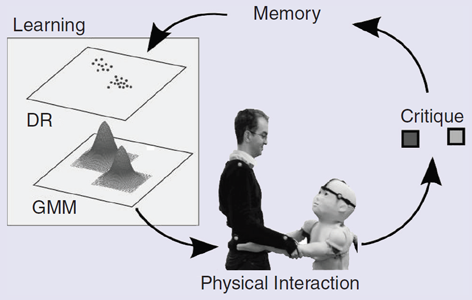 The human-in-the-loop learning system considered in the research, where the behavior of the human influences the behavior of the robot and, simultaneously, the behavior of the robot influences the behavior of the human. After a number of interactions, the learning system queries the memory for a new set of training data. The data are then projected onto a low-dimensional manifold using dimensional reduction techniques. Once the state vectors are projected onto a low dimensional manifold, we group the resulting points into sets according to the action performed in that state. Thus, we obtain for each possible action a set of states in which the corresponding action should be triggered. For each action, a GMM is learned. The model encodes a probability density function of the learned state vectors. In the next round of interaction, the action corresponding to the GMM with the highest likelihood is executed by the robot.
The human-in-the-loop learning system considered in the research, where the behavior of the human influences the behavior of the robot and, simultaneously, the behavior of the robot influences the behavior of the human. After a number of interactions, the learning system queries the memory for a new set of training data. The data are then projected onto a low-dimensional manifold using dimensional reduction techniques. Once the state vectors are projected onto a low dimensional manifold, we group the resulting points into sets according to the action performed in that state. Thus, we obtain for each possible action a set of states in which the corresponding action should be triggered. For each action, a GMM is learned. The model encodes a probability density function of the learned state vectors. In the next round of interaction, the action corresponding to the GMM with the highest likelihood is executed by the robot.

Related Papers selected from publication list
- Shuhei Ikemoto, Heni Ben Amor, Takashi Minato, Hiroshi Ishiguro, Bernhard Jung, "Mutual Learning and Adaptation in Physical Human-Robot Interaction", IEEE Robotics & Automation Magazine, Volume 19, Issue 4, 2012
- Takashi Minato, Yuichiro Yoshikawa, Tomoyuki Noda, Shuhei Ikemoto, Hiroshi Ishiguro, "CB2: Child robot with Biomimetic Body for Cognitive Developmental robotics", 2007 IEEE-RAS International Conference on Humanoid Robots, 2007.
- Shuhei Ikemoto, Heni Ben Amor, Takashi Minato, Hiroshi Ishiguro, Bernhard Jung, "Physical Interaction Learning: Behavior Adaptation in Cooperative Human-Robot Tasks Involving Physical contact", 18th IEEE International Symposium on Robot & Human Interactive Communication (IEEE RO-MAN 2009), 2009