
空気圧人工筋で駆動される筋骨格ロボットアームに関する研究
筋骨格ロボットアームの開発
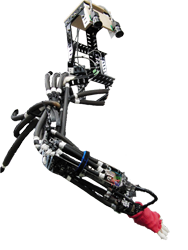
ヒトの筋骨格構造は非常に複雑で,工学的には一見,制御がしにくくなるなどの問題にしかならないようにも見えます.この研究では,「ヒトの複雑な筋骨格構造にはヒトの優れた運動能力を実現するための大きな利点を生み出している」という考えのもと,特にヒトの腕に注目し,その複雑な構造が持つ特性を可能な限り反映したロボットアームを開発し,実際にヒトが行っているさまざまな動作をロボットアームに行わせることで,その未知の利点の解明と工学的応用を目指しています.空気圧人工筋の柔軟性を利用したドア開け動作
私たちがドアを開ける時,ドアノブの位置を寸分の狂いも無く計測したり,ドアノブやドア本体がどの軸を中心に回転するのか精確に認識したりするでしょうか?少なくとも意識できる範囲では,ある意味”適当に”ドアノブに手をぶつけるようにして手を移動させてドアノブを掴み,手ごたえのまま”適当に”ドアノブを回し,”適当に”ドア本体を押したり引いたりしているように思えます.この研究では,ヒトの筋肉のように柔軟な空気圧人工筋で駆動される筋骨格ロボットを用いれば,非常に単純な制御でも,ヒトのように自然な動きでドア開けを行えることを示しました.また,各空気圧人工筋の圧力や張力のデータに「ドアノブが上手くつかめたか?」や「ドアに鍵がかかっているか否か?」といった情報が含まれることを確認しました.
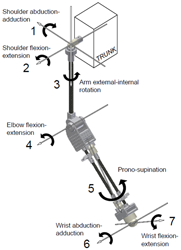
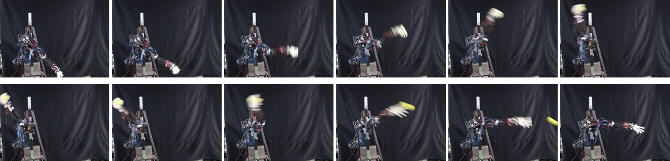
ヒト規範型の肩複合体構造を持つ筋骨格ロボットアームによる投球動作
ヒトの腕の中でも肩は特に複雑な構造を持っています.この研究では,ヒトの肩を構成する複数の骨や筋肉を可能な限り再現するため,従来よりも大幅に可動域を増加させた球面ジョイントや曲面上を滑るように移動する肩甲骨のメカニズムを提案し,それによってヒトのように広い可動域と優れた運動性能を実現しました.その結果,肩の働きが重要になる典型的な運動の一つである投球動作を実現し,各人工筋の駆動パタンによって各筋,各関節の協調関係が制御できることを示しました.
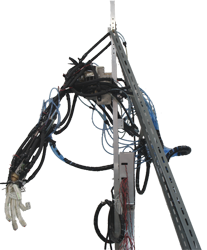
空気圧人工筋の解析的モデルに基づく単純な直接教示手法
直接教示とは,教示者がロボットに実際に触れて動かすことで,目的の動作を教示する手法です.通常であれば,各関節の角度あるいは各筋の長さを各時刻で計測し,それらを目標値として角度フィードバック制御器や筋の長さのフィードバック制御器に入力することで実現できるのですが,私たちが開発している筋骨格ロボットアームでは,3自由度球面ジョイントや2自由度楕円ジョイント,曲面上をスライドする肩甲骨メカニズムを持つため,角度の計測が困難であり,人工筋が骨や関節に巻きつくように配置されていることから,長さの計測も困難です.この研究では,教示時における各人工筋の圧力と張力を計測し,各筋の長さの計測やモデルに基づく推定を経ることなく,その動作を単独で再現するための圧力と張力の関係を導く手法を提案しています.


- Koh Hosoda, Shunsuke Sekimoto, Yoichi Nishigori, Shinya Takamuku, and Shuhei Ikemoto, "Anthropomorphic Muscular-Skeletal Robotic Upper Limb For Understanding Embodied Intelligence", Advanced Robotics, Vol.26, No.7, pp.729-744, 2012
- Shuhei Ikemoto, Yoichi Nishigori, Koh Hosoda, "Advantages of flexible musculoskeletal robot structure in sensory acquisition", Artificial Life and Robotics,2012
- Shuhei Ikemoto, Fumiya Kannou, and Koh hosoda, "Humanlike shoulder complex for musculoskeletal robot arms", IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.4892-4897, Oct. 2012
- Shuhei Ikemoto, Yoichi Nishigori, and Koh Hosoda, "Direct Teaching Method for Musculskeletal Robots driven by Pneumatic Artificial Muscles", IEEE International Conference on Robotics and Automation, pp.3185-3191, May. 2012.
最小行動規範と確率共鳴に関する研究
最小行動規範によって生じる確率共鳴
私たちが提案する最小行動規範は,非常に単純で一般的な行動ルールです.ある時刻tにおけるエージェントの行動を定めるn次元の運動指令ベクトルのi番目の要素をuitとし,時刻t+1における運動指令ベクトルの各要素を
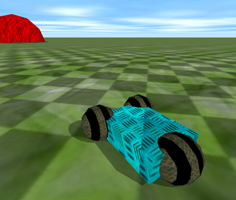
最小行動規範を応用したロボットの適応的行動の生成
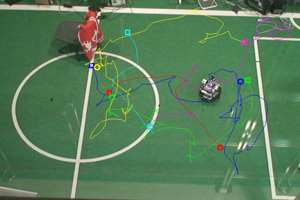
最小行動規範は,その単純さゆえに,適用するさいにはロボットのハードウェアや環境に関する情報をほとんど必要としません.よって,動作環境が急激に変化した場合や,ハードウェアが故障して通常の行動がとれなくなった場合などにおいても,その状態・時刻において最も評価を向上させる行動が最も高確率で選択されるという特性が失われることがありません.この研究では,車輪移動型ロボットにおいて,タイヤのパンクや車軸の変形といったロボットの故障,ロボットへの制御信号がある頻度でロボットに到達しないといった不具合などを再現し,その場合でも最小行動規範の確率的な特性が失われないことを確認しました.
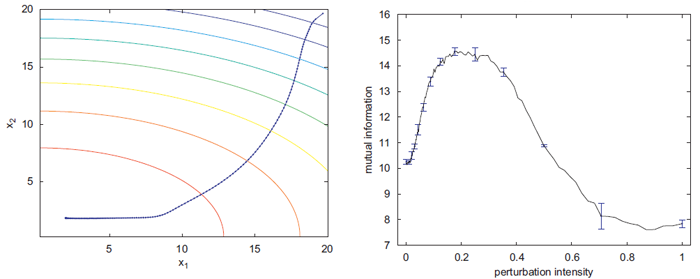
複数素子の疑似相関を利用した確率共鳴の最適化
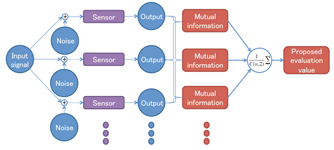
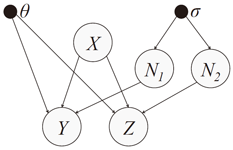
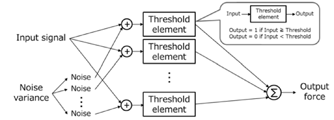
確率共鳴の工学的応用としては,「センサ解像度未満の微小な信号を検出する」という試みが最も広く行われてきました.これらの応用において,確率共鳴を生じさせるためには,その微小な信号の分布に応じた適切な確率分布を持つノイズがシステムに加わる必要があります.しかし,この要求に改めて注目すると,検出したい対象である微小な信号の分布を予め知ることが適切なノイズ強度を求めるのに必要であることが分かります.私たちは,この確率共鳴の工学的応用における重大な問題の解決に取り組み,その解決策の一つとして,一つの微小な信号に対して確率共鳴によってセンシングを行う素子を複数用意し,その間の相関(疑似相関)を用いてノイズ強度を調節する手法を提案し,シミュレーションと実験によってその妥当性を示しました.
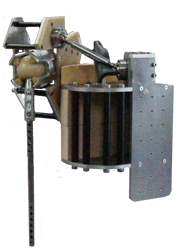
確率共鳴に基づく生物規範型アクチュエータの制御
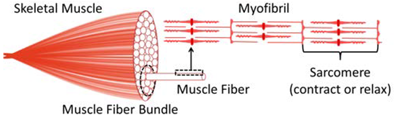
確率共鳴によるノイズの利用は,一見すると上手く動くように見えないぐらい単純なシステムでも目的を達成できる可能性を広げます.私たちは多数の収縮・弛緩の2状態しかとれないアクチュエータが集めて一つのアクチュエータとしたヒトの骨格筋のようなアクチュエータの制御に注目し,ノイズを利用すれば同一の閾値による比較演算だけの単純な装置で収縮するアクチュエータの数を連続的に制御できることを示しました.

に従って生成するというものです.ここで,Rはランダムな値(例えばホワイトガウシアンノイズ),ηiはi番目の要素に加わるノイズの強さ,ΔAtは時刻tにおいてどの程度エージェントの状態が改善したかを表す量を意味します.つまり,「状態が改善したなら(どの程度かに依らず)前の行動を繰り返し,状態が悪化したなら(どの程度かに依らず)ランダムに行動する」というルールに,ノイズの影響で全く同じ行動を繰り返すことは出来ないという条件を加えたものと表現できます.
この最小行動規範は,「どの程度改善したか?」という勾配情報を用いないため,一見は評価の勾配に沿った行動ができないように見えますが,実は,ノイズが加わることによって行動には勾配情報が反映されるという面白い現象が生じます.この研究では,この現象が確率共鳴と呼ばれる現象に相当する現象であることを数値シミュレーションによって示したほか,そのエージェントが最も高確率でとる行動は,その時刻tにおいて評価を最も向上させる行動(つまり,評価関数の最急勾配方向に移動する行動)に一致することを理論的に証明しました.
- Shuhei Ikemoto, Fabio DallaLibera, Koh Hosoda, Hiroshi Ishiguro, "Minimalistic Behavioral Rule derived from Bacterial Chemotaxis in a Stochastic Resonance Setup", Physical Review E, Volume 85, Issue 2, 8 February 2012, Pages 021905
- Shuhei Ikemoto, Fabio DallaLibera, Hiroshi Ishiguro, "Stochastic Resonance Emergence from a Minimalistic Behavioral Rule", Journal of Theoretical Biology, Volume 273, Issue 1, 21 March 2011, Pages 179-187
- Fabio DallaLibera, Shuhei Ikemoto, Takashi Minato, Hiroshi Ishiguro, Emanuele Menegatti and Enrico Pagello, "A parameterless biologically inspired control algorithm robust to nonlinearities, dead-times and low-pass filtering effects", 2nd International Conference on Simulation, Modeling and Programming for Autonomous Robots (SIMPAR2010), 2010
- Nagisa Koyama, Shuhei Ikemoto, Koh Hosoda, "Redundant sensor system for stochastic resonance tuning without input signal knowledge", IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.4892-4897, Oct. 2012.
- Shuhei Ikemoto, Yosuke Inoue, Masahiro Shimizu, Koh Hosoda: Minimalistic decentralized control using stochastic resonance inspired from a skeletal muscle. IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.343-348, 2013.
物理的なヒト-ロボット間インタラクションに関する研究
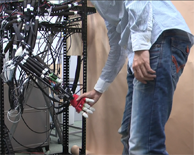
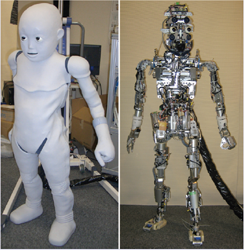
全身52自由度を有する空気圧駆動ヒューマノイドロボット
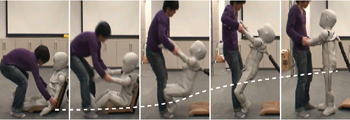
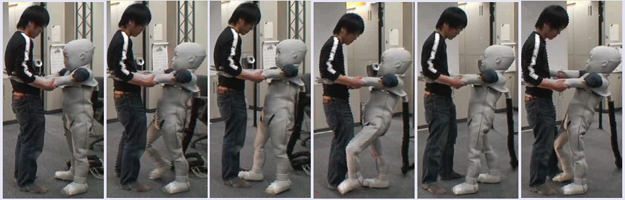
CB2は,赤ちゃんの発達過程を構成論的に調べるためのプラットフォームとして開発された全身52自由度を有する空気圧駆動ヒューマノイドロボットです.作動流体である空気の圧縮性により,各関節に柔軟性があるため,特別な制御を行うことなく,ヒトとの物理的なインタラクションを安全に実現することができます.例に示したヒトがロボットを引き起こして立たせるインタラクションは,各関節のPID角度フィードバック制御系に対し,目標値を2回切り替えるという簡単な制御によって実現しています.非常に単純な制御ですが,ロボットの関節の柔軟性によって,ロボットの動作は引き起こす人間の動きにあわせて変化し,安全性にとどまらない適応性を有することを確認しました.
密接な物理的インタラクションにおけるHuman-in-the-Loop学習

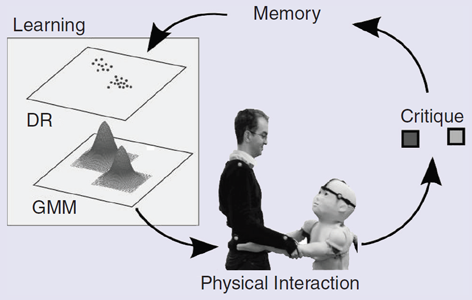 前述の物理的なヒト-ロボット間インタラクションにおいて,ヒトとロボットの運動は,双方が互いから受ける力によって変化します.つまり,この間のヒトとロボットの運動は,互いに他方が欠けては実現できない運動になっています.この研究では,「この密なインタラクションの結果として生じているヒトとロボットの運動を,インタラクション相手であるヒトの要望に合うようなインタラクションになるようにロボットの運動を変化させるにはどのようにすれば良いのか?」という非常にチャレンジングな問題に取り組んでいます.その一つの手法として,私たちが提案するHuman-in-the-Loop学習では,インタラクション相手である人間が直前のインタラクションを「良い・悪い」の二値で評価し,ロボットが「良い」と判定されたデータを低次元化・確率モデル化することで,次のインタラクションにおける制御則を変化させ,インタラクション全体を変化させていきます.非常に複雑な物理的インタラクションを扱うため,残念ながらこの学習システムが収束することを証明,あるいは十分に直感的に説明することは出来ませんが,多数の被験者実験を通じてこの学習システムの妥当性を示しています.また,「引き起こし」にとどまらず「ヒトがロボットを補助しつつロボットが歩く」という物理的インタラクションにおいても適用可能であることを示しました.
前述の物理的なヒト-ロボット間インタラクションにおいて,ヒトとロボットの運動は,双方が互いから受ける力によって変化します.つまり,この間のヒトとロボットの運動は,互いに他方が欠けては実現できない運動になっています.この研究では,「この密なインタラクションの結果として生じているヒトとロボットの運動を,インタラクション相手であるヒトの要望に合うようなインタラクションになるようにロボットの運動を変化させるにはどのようにすれば良いのか?」という非常にチャレンジングな問題に取り組んでいます.その一つの手法として,私たちが提案するHuman-in-the-Loop学習では,インタラクション相手である人間が直前のインタラクションを「良い・悪い」の二値で評価し,ロボットが「良い」と判定されたデータを低次元化・確率モデル化することで,次のインタラクションにおける制御則を変化させ,インタラクション全体を変化させていきます.非常に複雑な物理的インタラクションを扱うため,残念ながらこの学習システムが収束することを証明,あるいは十分に直感的に説明することは出来ませんが,多数の被験者実験を通じてこの学習システムの妥当性を示しています.また,「引き起こし」にとどまらず「ヒトがロボットを補助しつつロボットが歩く」という物理的インタラクションにおいても適用可能であることを示しました.

- Shuhei Ikemoto, Heni Ben Amor, Takashi Minato, Hiroshi Ishiguro, Bernhard Jung, "Mutual Learning and Adaptation in Physical Human-Robot Interaction", IEEE Robotics & Automation Magazine, Volume 19, Issue 4, 2012
- Takashi Minato, Yuichiro Yoshikawa, Tomoyuki Noda, Shuhei Ikemoto, Hiroshi Ishiguro, "CB2: Child robot with Biomimetic Body for Cognitive Developmental robotics", 2007 IEEE-RAS International Conference on Humanoid Robots, 2007.
- Shuhei Ikemoto, Heni Ben Amor, Takashi Minato, Hiroshi Ishiguro, Bernhard Jung, "Physical Interaction Learning: Behavior Adaptation in Cooperative Human-Robot Tasks Involving Physical contact", 18th IEEE International Symposium on Robot & Human Interactive Communication (IEEE RO-MAN 2009), 2009