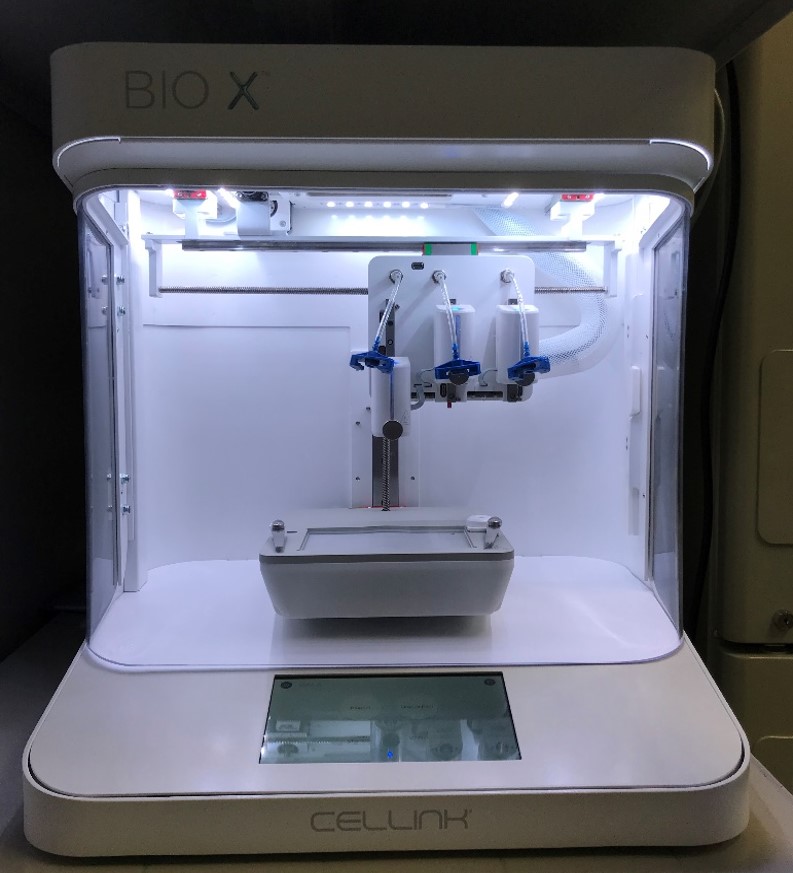
Living things have different sizes and weight bodies, but they can move using the same actuator, which is muscle.As a bio-hybrid system, we aim the availability of skeletal muscle as an actuator in robotics. In this study, we study the methods to design the movement of muscle using 3Dprinter that can print muscle cells.